Schedule
Keras and Neural Network Fundamentals
MLflow and Spark UDFs
Hyperparameter Tuning with Hyperopt
Horovod: Distributed Model Training
LIME, SHAP & Model Interpretability
CNNs and ImageNet
Transfer Learning
Object Detection
Generative Adversarial Networks (GANs)
Survey
Pandas/Spark?
Machine Learning? Deep Learning?
Expectations?
Why Deep Learning?
Performs well on complex datasets like images, sequences, and natural language
Scales better as data size increases
Theoretically can learn any shape (universal approximation theorem)
Open Source Landscape
Where Does DL Fit In?
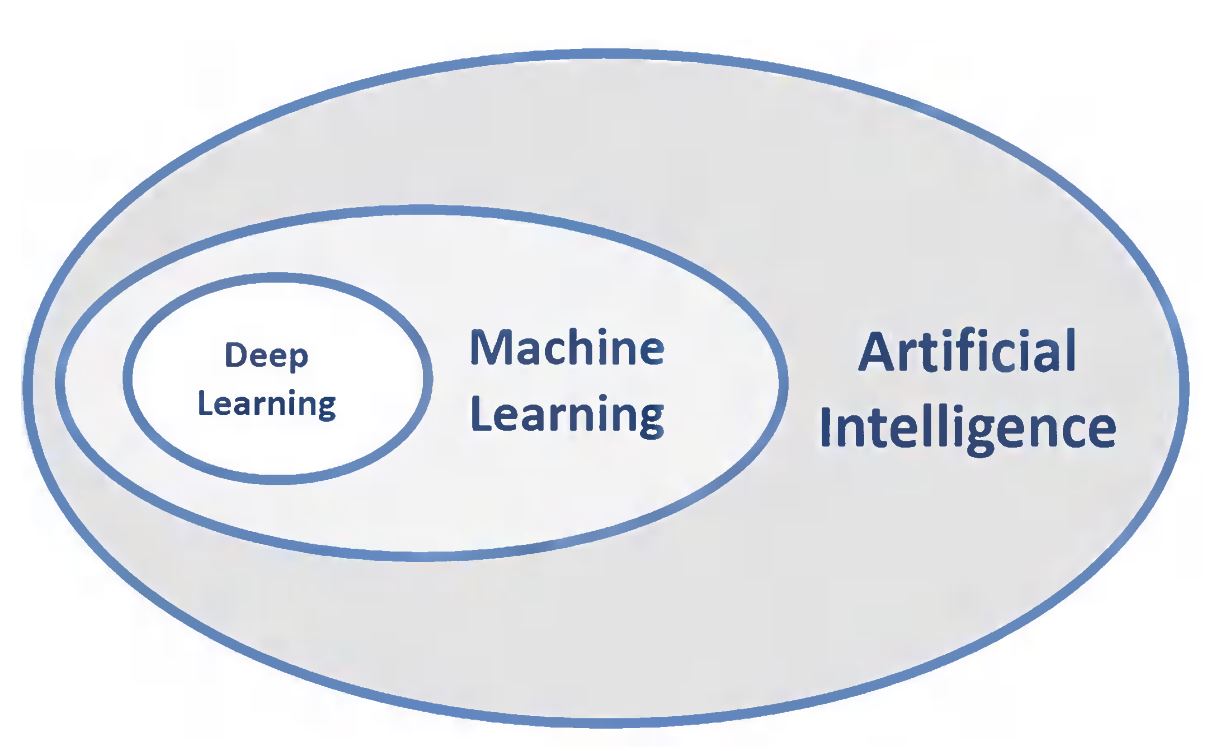
What is Deep Learning?
Composing representations of data in a hierarchical manner

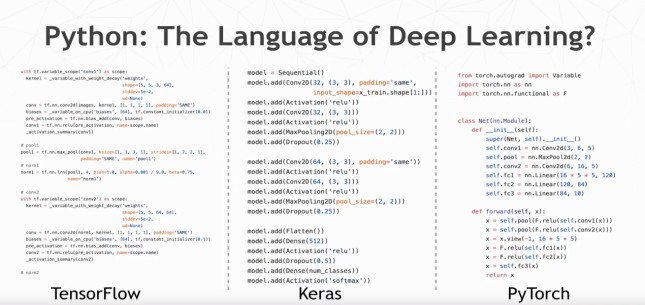
Keras
High-level Python API to build neural networks
Official high-level API of TensorFlow
Has over 250,000 users
Released by François Chollet in 2015
Why Keras?

Hardware Considerations
GPUs are prefered for training due to speed of computation, but not good in data transfer
CPUs are generally acceptable for inference
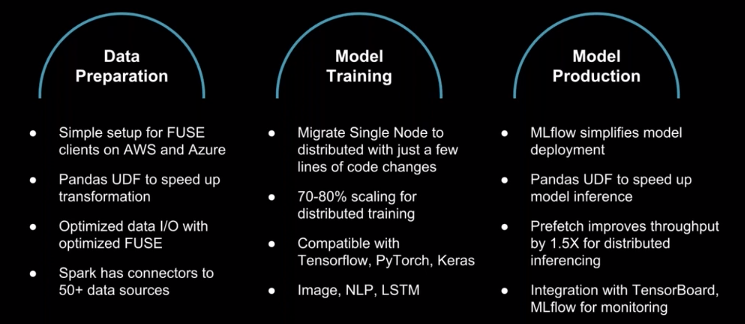
Why DL on Databricks?
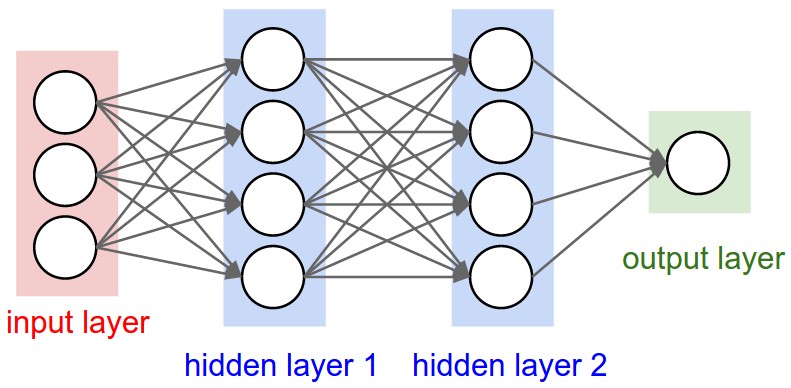
Layers
Input layer
Zero or more hidden layers
Output layer
Regression Evaluation
Measure "closeness" between label and prediction
- When predicting someone's weight, better to be off by 2 lbs instead of 20 lbs
Evaluation metrics:
- Loss: $(y - \hat{y})$
- Absolute loss: $|y - \hat{y}|$
- Squared loss: $(y - \hat{y})^2$
Evaluation metric: MSE
$Error_{i} = (y_{i} - \hat{y_{i}})$
$SE_{i} = (y_{i} - \hat{y_{i}})^2$
$SSE = \sum_{i=1}^n (y_{i} - \hat{y_{i}})^2$
$MSE = \frac{1}{n}\sum_{i=1}^n (y_{i} - \hat{y_{i}})^2$
$RMSE = \sqrt{\frac{1}{n}\sum_{i=1}^n (y_{i} - \hat{y_{i}})^2}$
Backpropagation
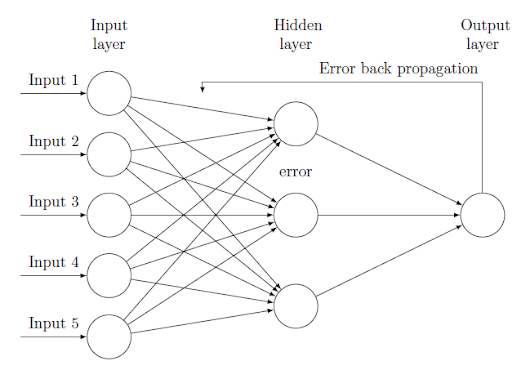
Calculate gradients to update weights
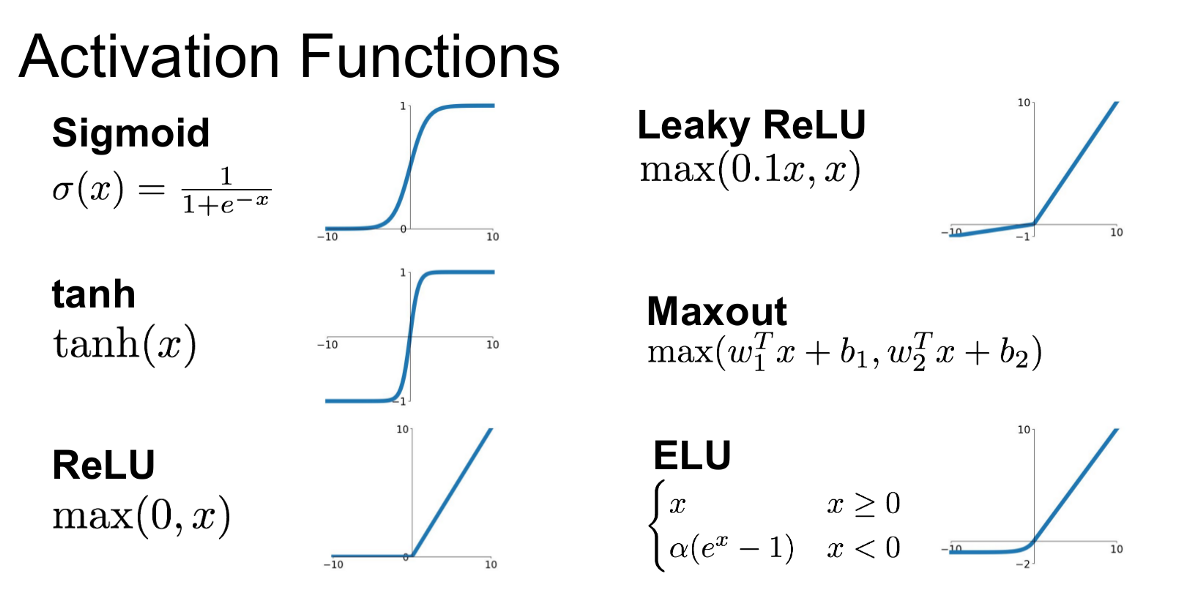
Activation Functions
Provide non-linearity in our neural networks to learn more complex relationships
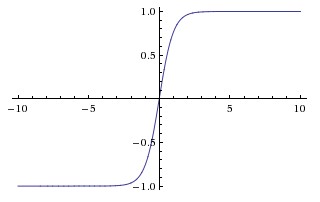
Sigmoid
Tangent
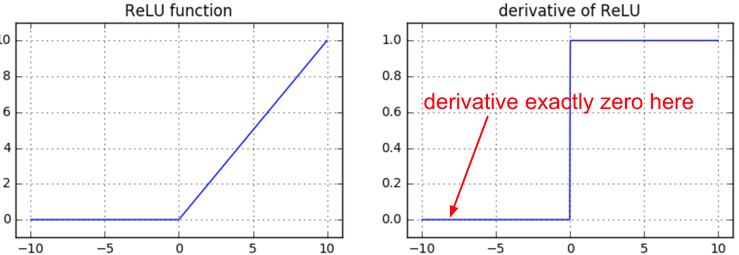
ReLU
Leaky ReLU
PReLU
ELU
Sigmoid
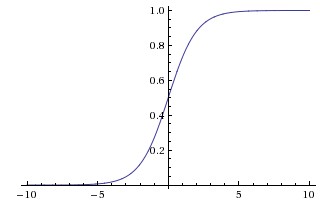
Saturates and kills gradients
Not zero-centered
Hyperbolic tanget (Tanh)
Zero centered!
BUT, like the sigmoid, its activations saturate
ReLU
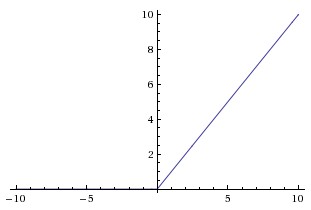
BUT, gradients can still go to zero
Leaky ReLU
For x < 0: $$f(x) = \alpha * x$$ For x >= 0: $$f(x) = x$$
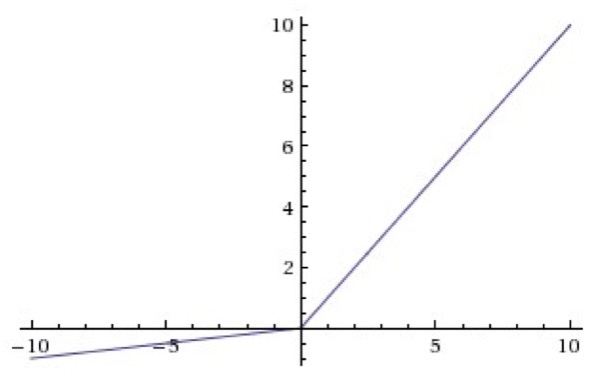
These functions are not differentiable at 0, so we set the derivative to 0 or average of left and right derivative
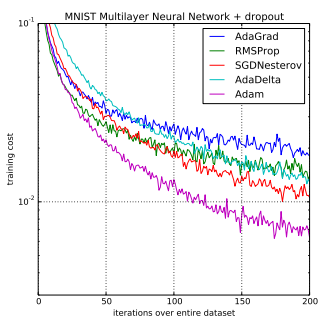
Comparison
Stochastic Gradient Descent (SGD)
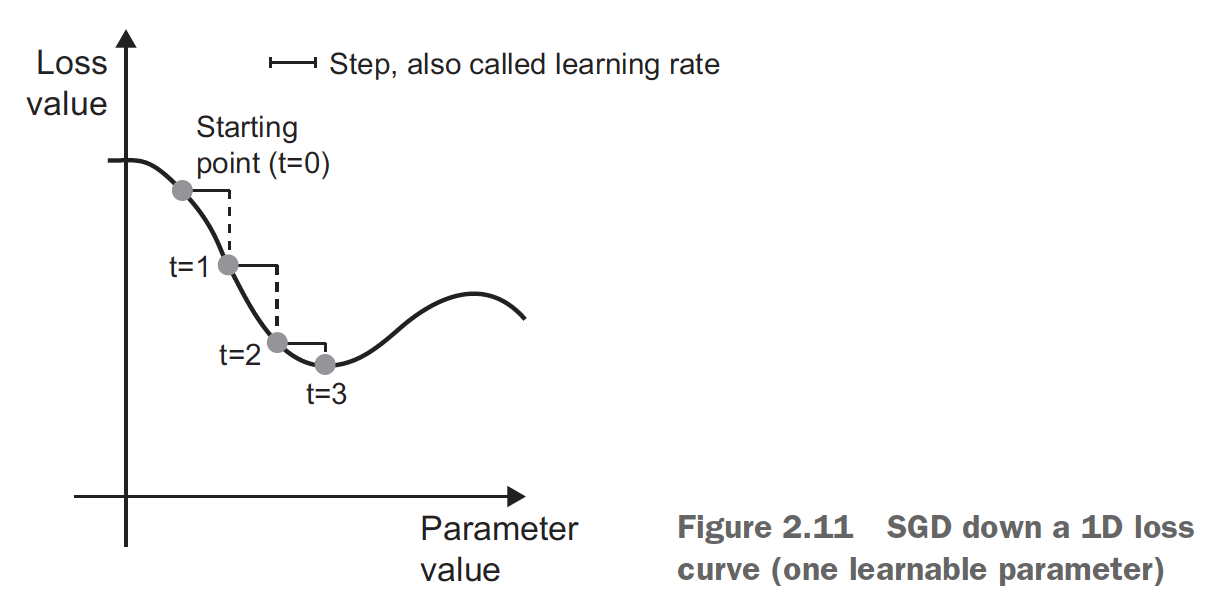
Choosing a proper learning rate can be difficult
Stochastic Gradient Descent
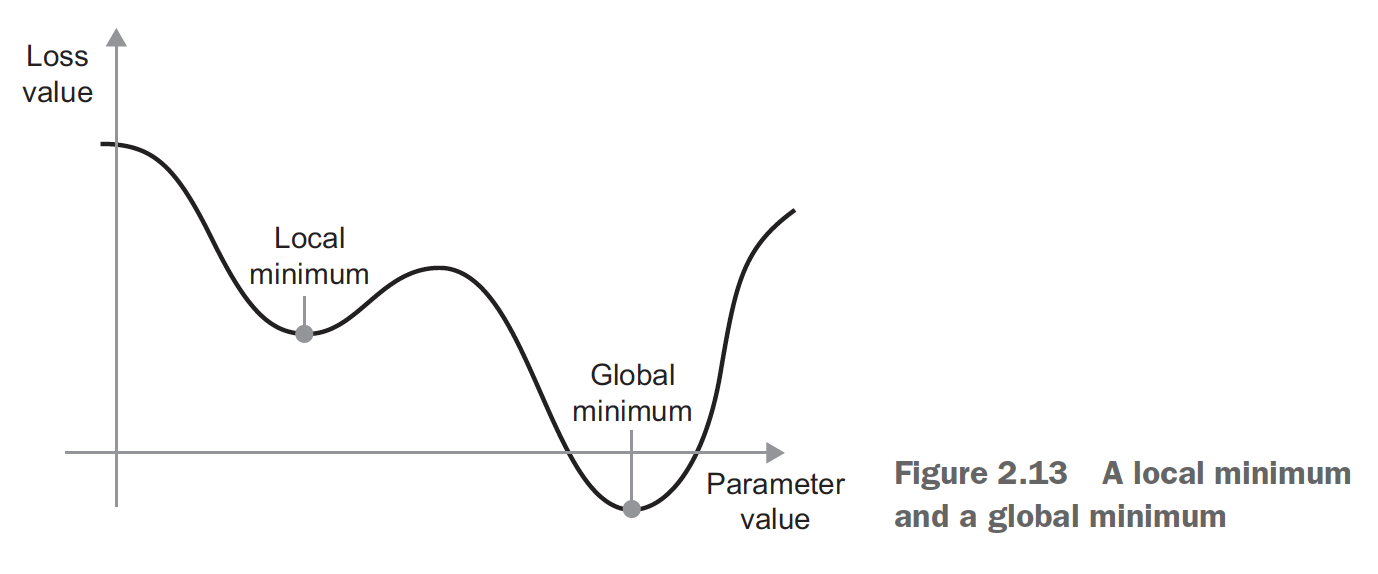
Easy to get stuck in local minima
Momentum
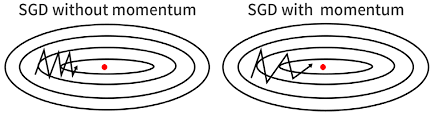
Accelerates SGD: Like pushing a ball down a hill
Take average of direction we’ve been heading (current velocity and acceleration)
Limits oscillating back and forth, gets out of local minima
ADAM
Adaptive Moment Estimation (Adam)
Hyperparameter Selection
Which dataset should we use to select hyperparameters? Train? Test?
Validation Dataset
Split the dataset into three!
- Train on the training set
- Select hyperparameters based on performance of the validation set
- Test on test set
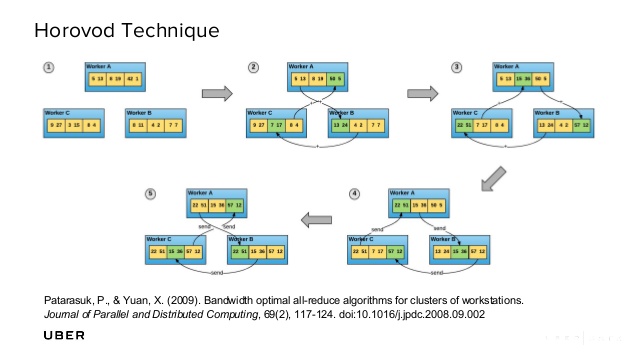
Horovod

Horovod
Created by Alexander Sergeev of Uber, open-sourced in 2017
Simplifies distributed neural network training
Supports TensorFlow, Keras, PyTorch, and Apache MXNet
Classical Parameter Server
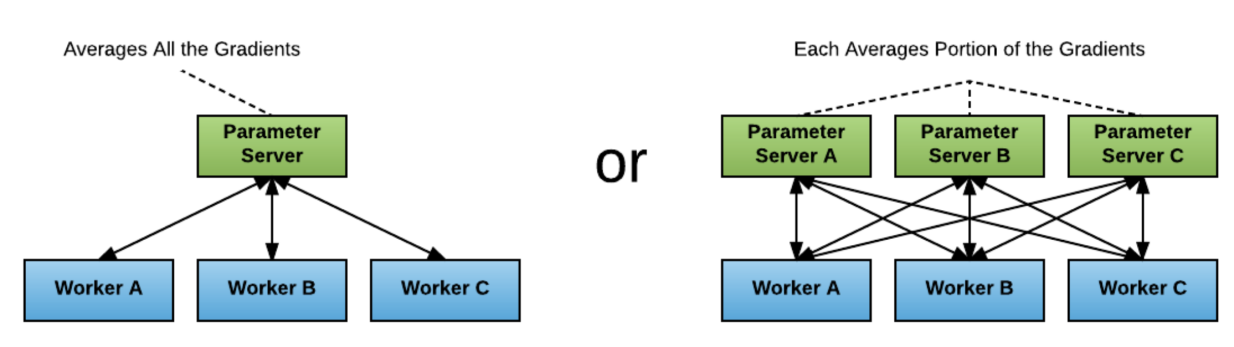
All-Reduce
# Only one line of code change!
optimizer = hvd.DistributedOptimizer(optimizer)
LIME
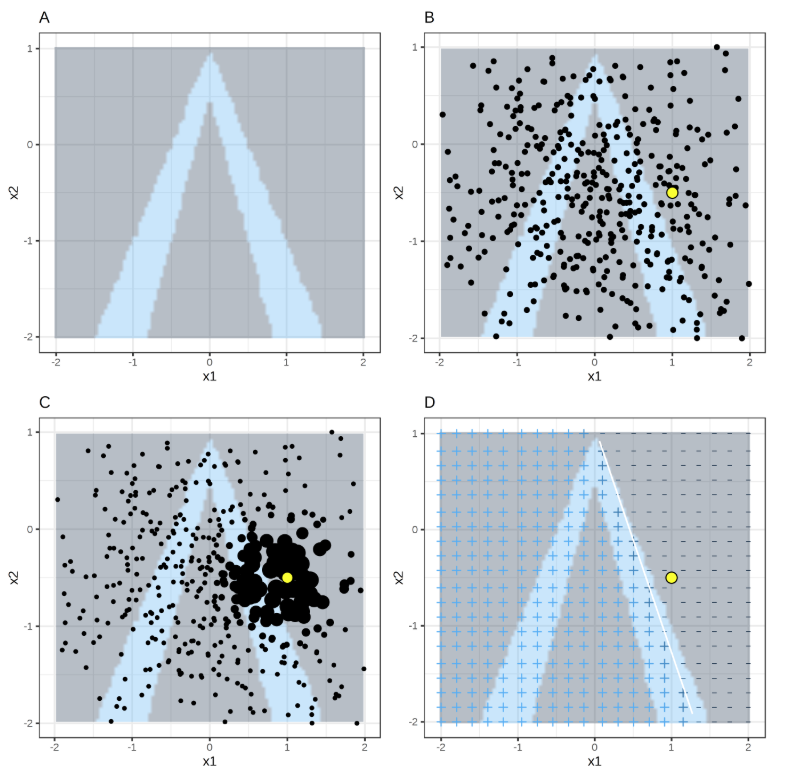
SHAP
SHAP
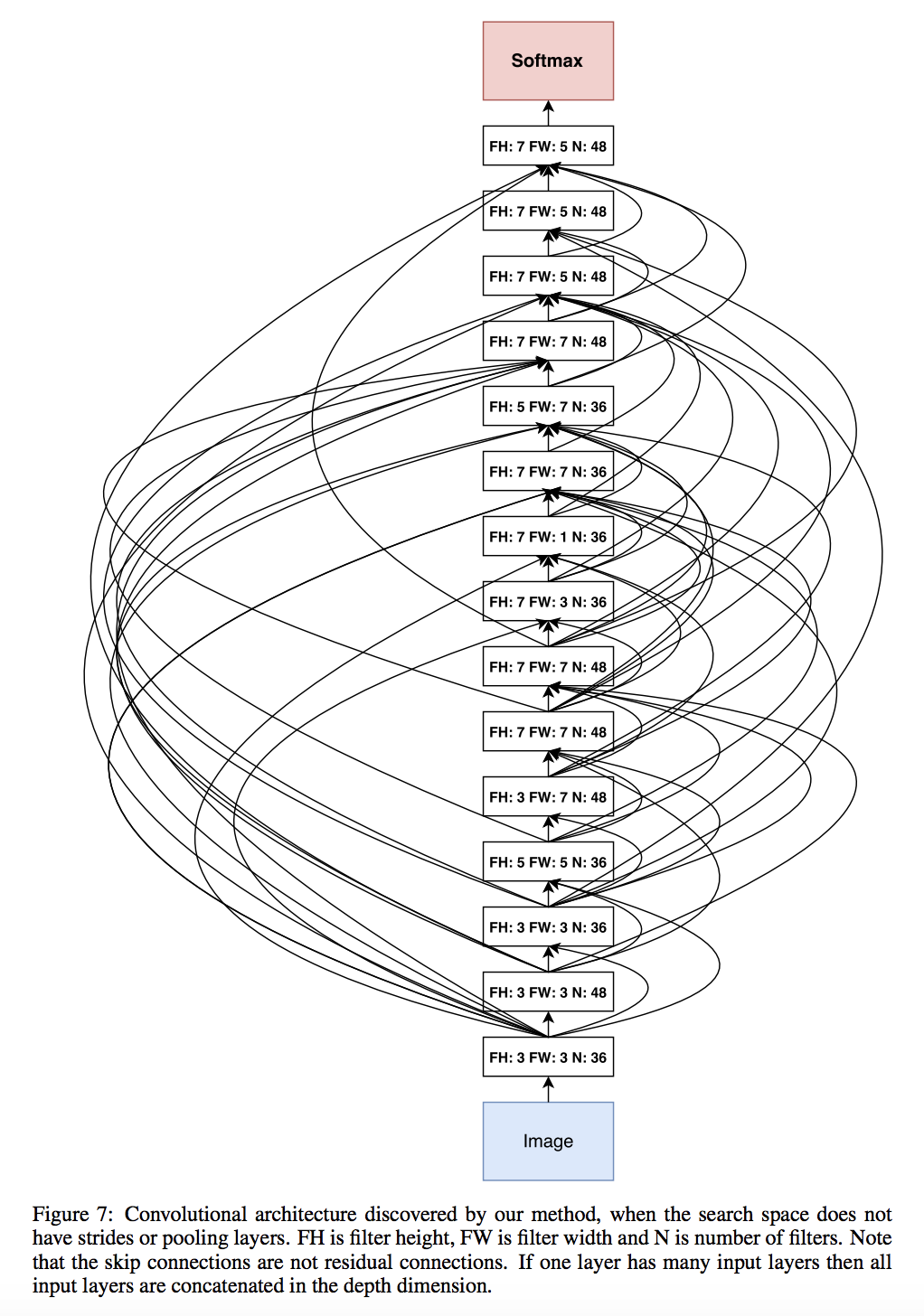
Convolutions
Focus on Local Connectivity (fewer parameters to learn)
Filter/kernel slides across input image (often 3x3)
Image Kernels VisualizationCS 231 Convolutional Networks
ImageNet Challenge
Classify images in one of 1000 categories
2012 Deep Learning breakthrough with AlexNet: 16% top-5 test error rate (next closest was 25%)
VGG16 (2014)
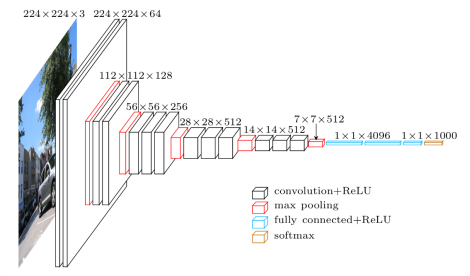
One of the most widely used architectures for its simplicity
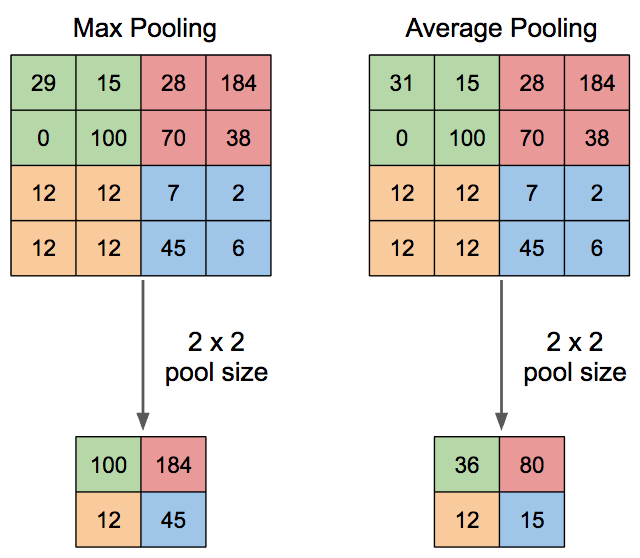
Max vs Avg. Pooling
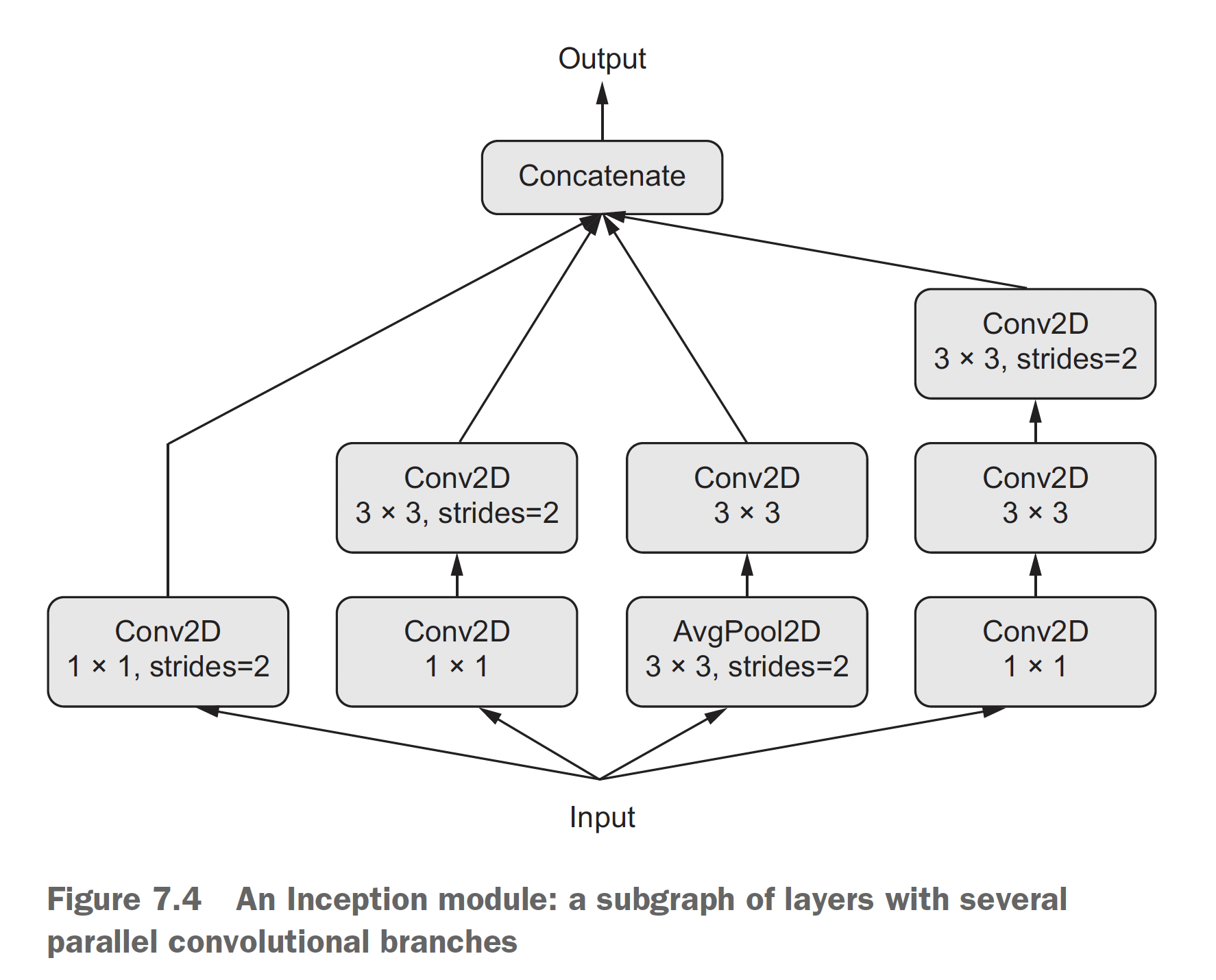
Inception
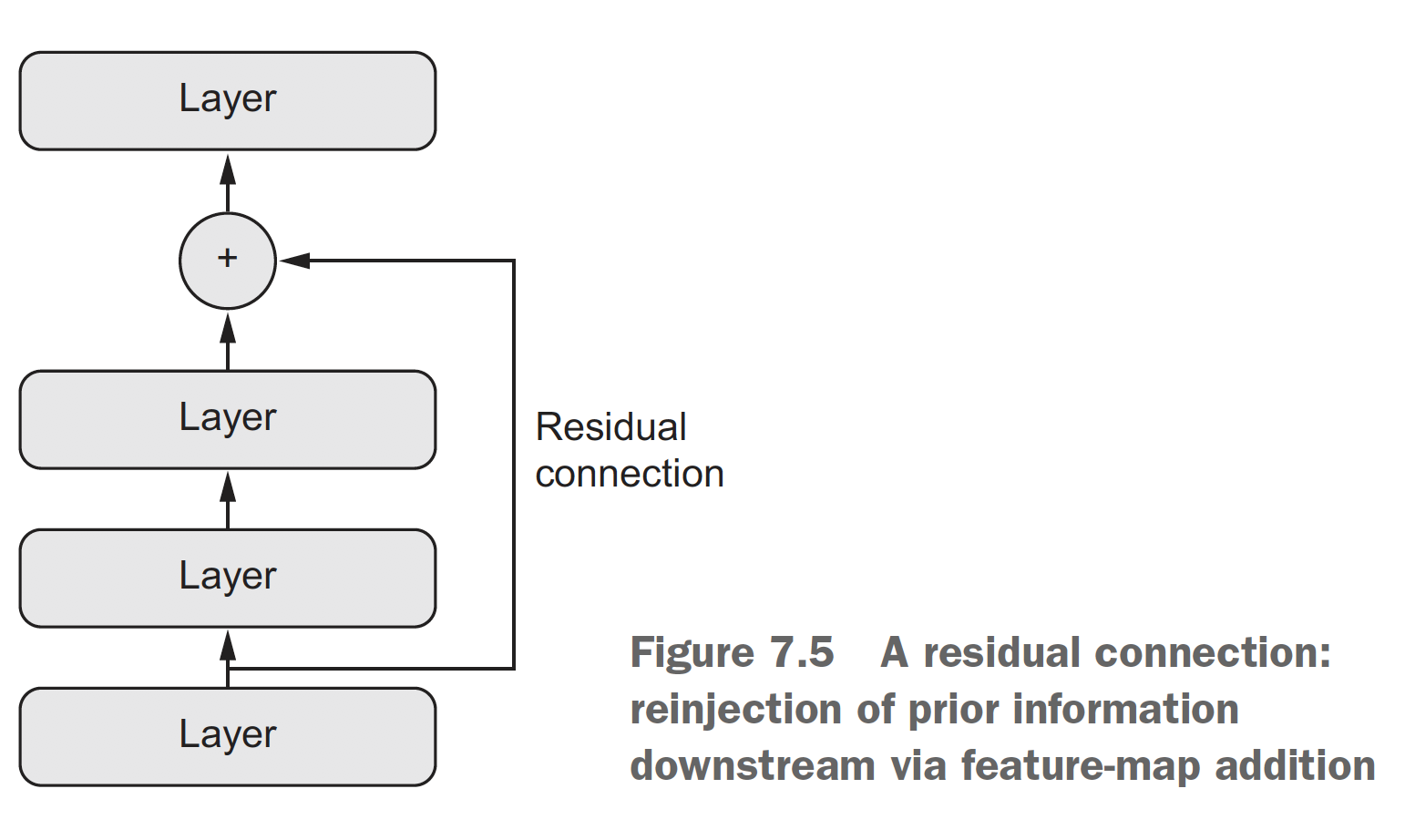
Residual Connection
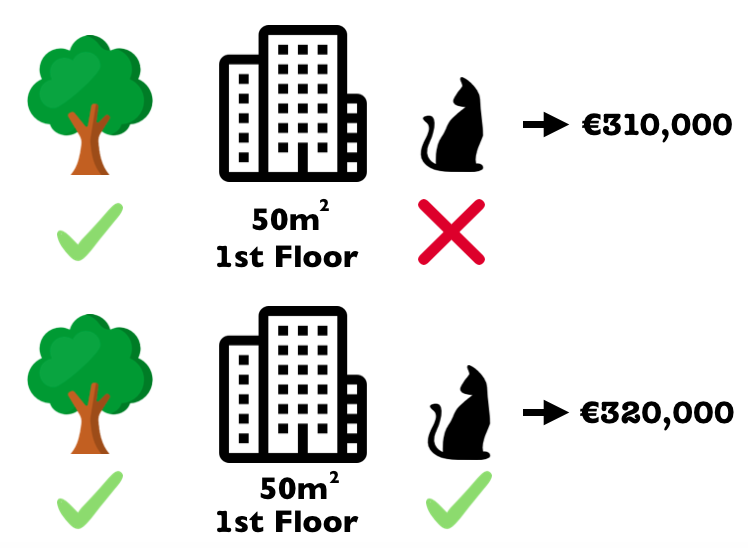
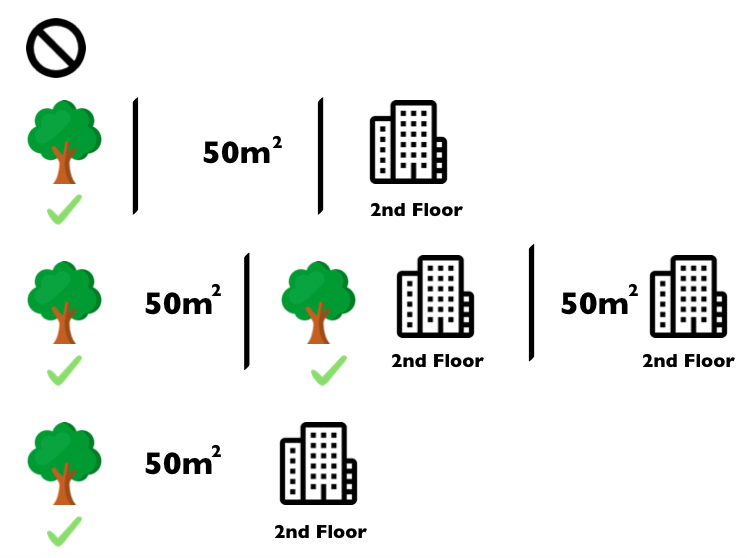
Transfer Learning
IDEA: Intermediate representations learned for one task may be useful for other related tasks
When to use Transfer Learning?

Generative Adversarial Networks (GANs)
Estimates generative models
Simultaneously trains two models
G: a generative model captures the data distribution
D: a discriminative model predicts probability of data coming from G
Used in generating art, deep fakes, up-scaling graphics, and astronomy research
GANs Architecture: 2 Models
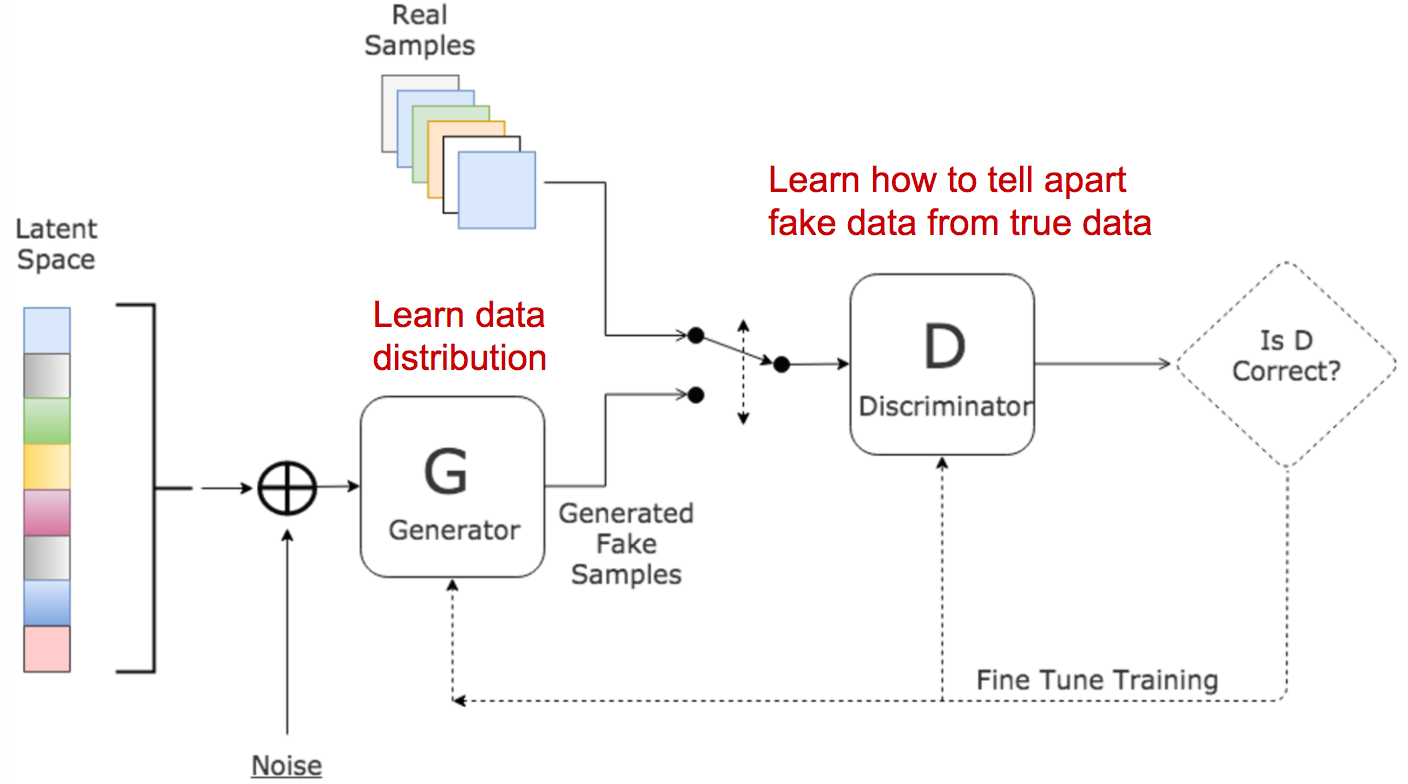
The Algorithm
G takes noise as input, outputs a counterfeit
D takes counterfeits and real values as input, outputs P(counterfeit)
To prevent overfitting...
- Alternate k steps of optimizing D and one step of optimizing G
- Start with k of at least 5
- Use log(1 - D(G(z))) to provide stronger, non-saturated gradients